Im Kurs „Cobots – Interdisziplinäre Ansätze für Handwerk, Produktion und Gesellschaft“ (Prof. Linner, Prof. Weininger) arbeiteten 9 Bauingenieur-Studierende und 20 Mechatronik-Studierende fachübergreifend zusammen. In vier Teams entwickelten sie praxisnahe Lösungen und präsentierten Live-Demonstrationen zum Semesterabschluss.
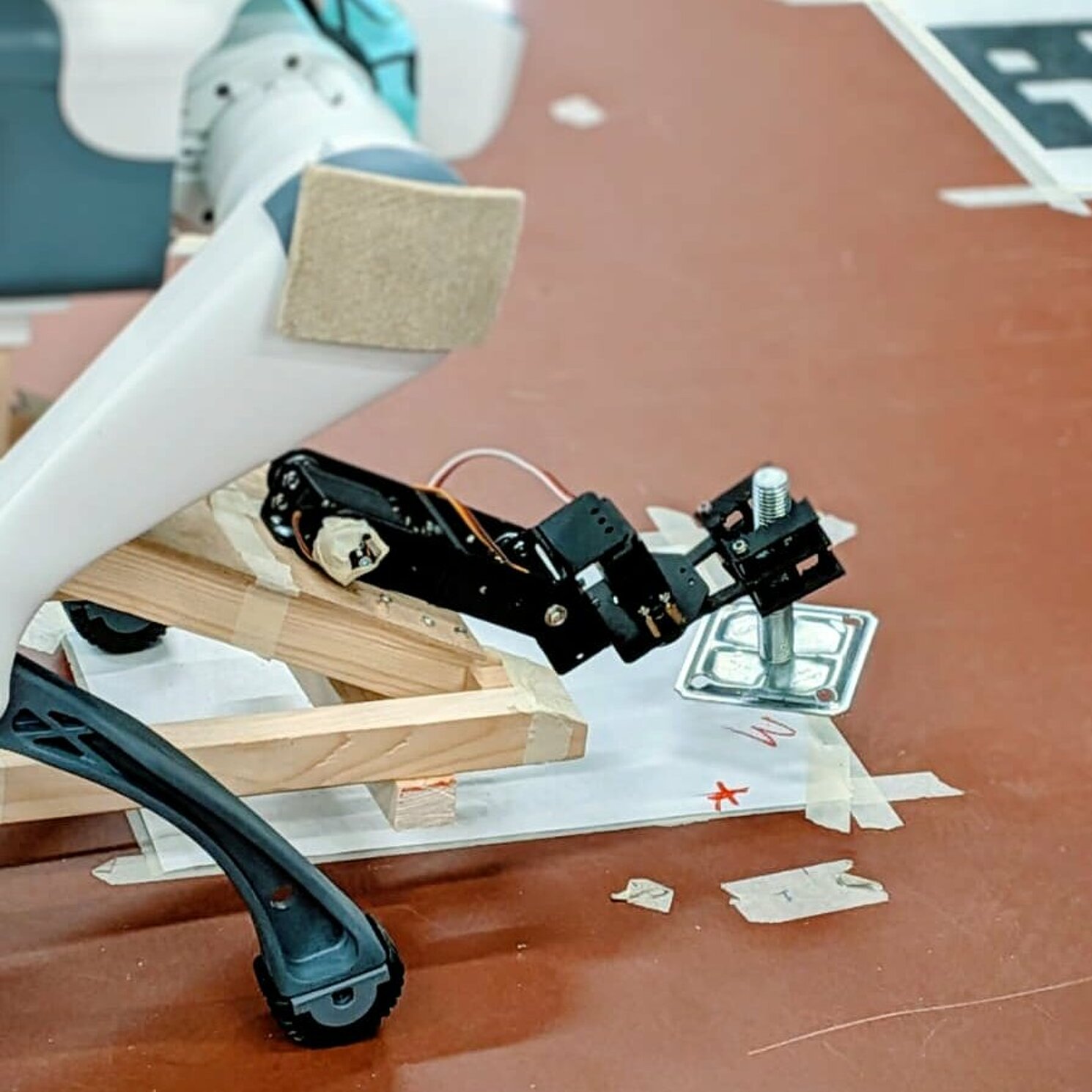
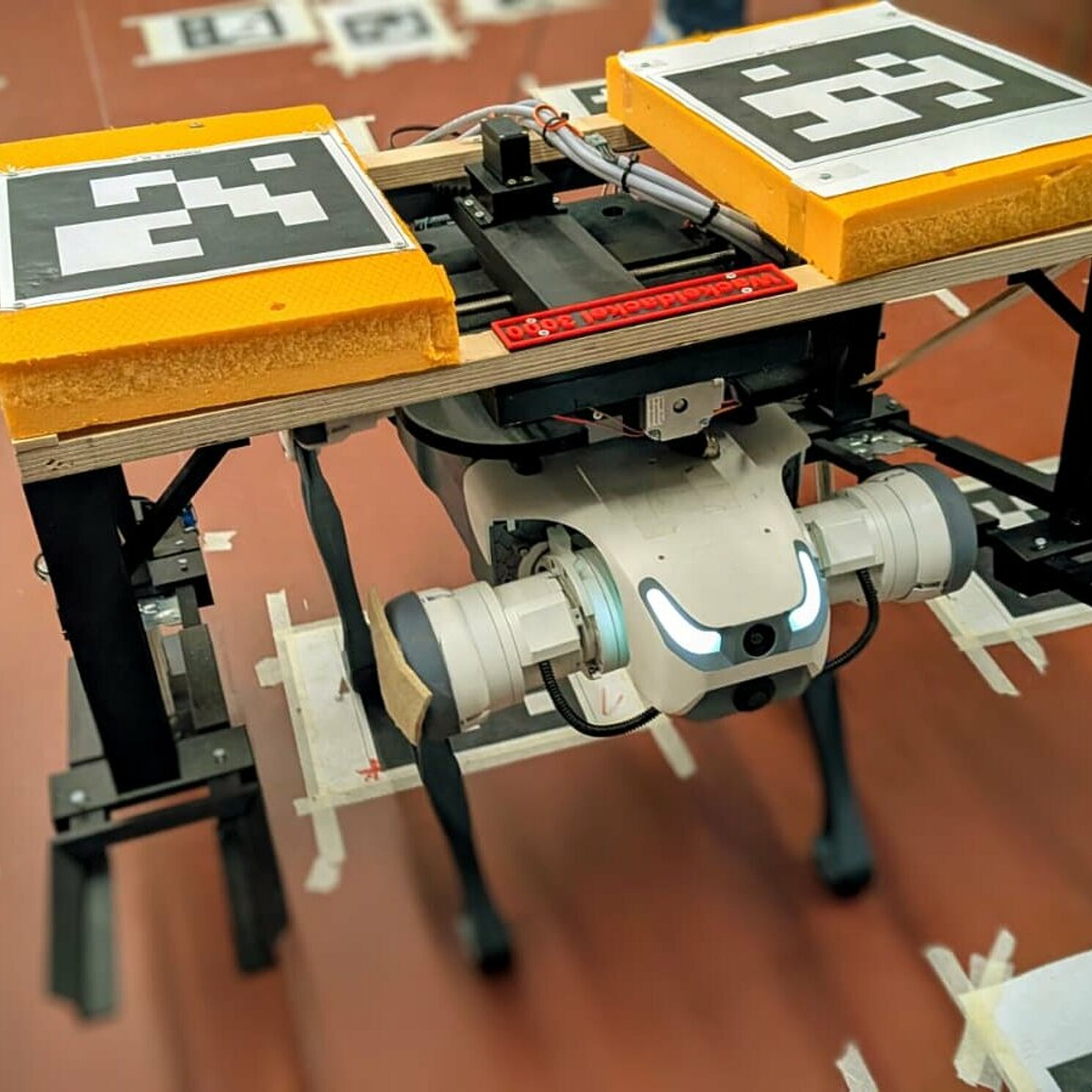
Im Zentrum stand ein realer industrieller Anwendungsfall, eng begleitet von Lindner: die teilautomatisierte Montage von Industriebodensystemen mit einem Quadruped-Roboter (Deep Robotics SID-1). Lindner stellte das Bodensystem bereit, definierte Randbedingungen und Performance-Ziele und sorgte so für einen direkten Bezug zur Baupraxis.
Projektinhalte (Auswahl):
- Analyse eines manuellen Montageprozesses aus robotischer Sicht
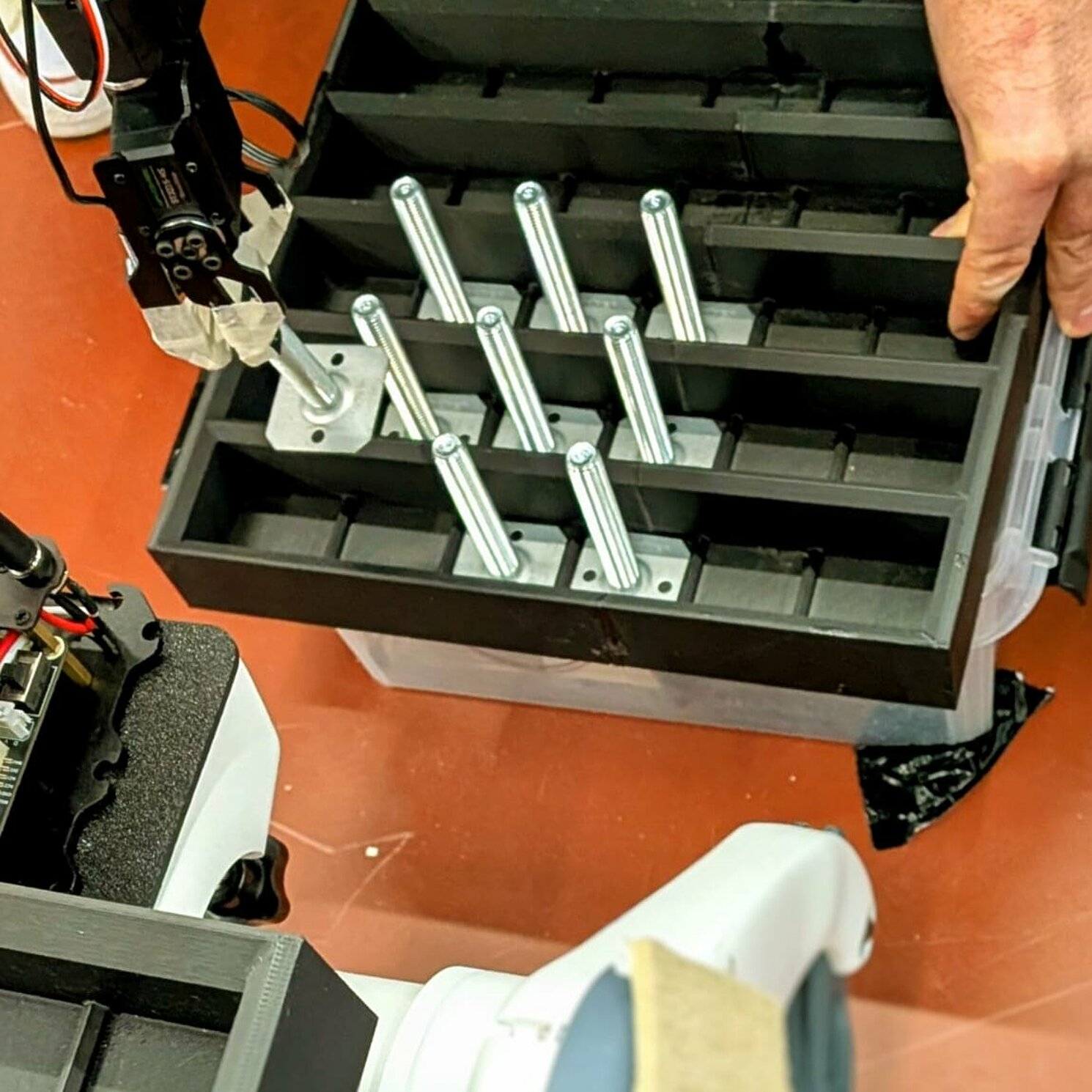
- Entwicklung autonomer Montage- und Logistikkonzepte
- Low-Cost-Prototyping mit Arduino und 3D-gedruckten Bauteilen
- Iterative Optimierung und Wettbewerb nach Präzision, Robustheit und Zeit
Mehrwert der Industriekooperation: Die kontinuierliche Rückkopplung zu Machbarkeit, Toleranzen und Montagelogik machte aus der Lehrveranstaltung ein praxisorientiertes Bauautomationsprojekt statt einer reinen Robotikübung.
Fazit: Der Kurs zeigt, wie interdisziplinäre Zusammenarbeit, Quadruped-Roboter, Design-to-Fabrication und Low-Cost-Prototyping genutzt werden können, um zukunftsfähige Automationskonzepte für Bau und Handwerk mit unmittelbarer Industrierelevanz zu entwickeln.